| Rťfťrence | ROM | RAM | EEPROM | Timer | E/S circuit seul | E/S ťtendu | Sťrie | Boitier | Vitesse Bus |
| 68HC11A1 | non | 256o | 512o | oui | 38 | 22 | oui | 52 PLCC | 3MHz |
| 68HC811E2 | non | 256o | 2ko | oui | 38 | 32 | oui | 52 PLCC | 2MHz |
| 68HC711E9 | non | 512o | 512o | oui | 38 | 22 | oui | 52 PLCC | 3MHz |
| 68HC11F1 | non | 1ko | 512o | oui | 0 | 30 | oui | 68 PLCC | 4MHz |
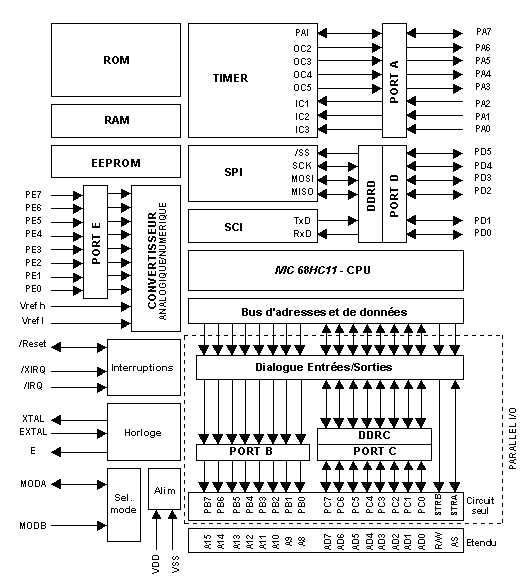
| MODA | MODB | Mode de fonctionnement |
| 1 | 0 | mode circuit seul |
| 1 | 1 | mode ťtendu |
| 0 | 0 | mode spťcial bootstrap |
| 0 | 1 | mode spťcial test |
| S | X | H | I | N | Z | V | C |

| Adresse en mode normal | Adresse en mode bootstap | Vecteur |
| $FFD6,$FFD7 | $00C4,$00C5,$00C6 | SCI |
| $FFD8,$FFD9 | $00C7,$00C8,$00C9 | Fin transmission sur la SPI |
| $FFDA,$FFDB | $00CA,$00CB,$00CC | Front actif sur accu d'impulsion |
| $FFDC,$FFDD | $00CD,$00CE,$00CF | Dťbordement sur accu d'impulsion |
| $FFDE,$FFDF | $00D0,$00D1,$00D2 | Dťbordement TIMER |
| $FFE0,$FFE1 | $00D3,$00D4,$00D5 | TOC5 |
| $FFE2,$FFE3 | $00D6,$00D7,$00D8 | TOC4 |
| $FFE4,$FFE5 | $00D9,$00DA,$00DB | TOC3 |
| $FFE6,$FFE7 | $00DC,$00DD,$00DE | TOC2 |
| $FFE8,$FFE9 | $00DF,$00E0,$00E1 | TOC1 |
| $FFEA,$FFEB | $00E2,$00E3,$00E4 | TIC3 |
| $FFEC,$FFED | $00E5,$00E6,$00E7 | TIC2 |
| $FFEE,$FFEF | $00E8,$00E9,$00EA | TIC1 |
| $FFF0,$FFF1 | $00EB,$00EC,$00ED | Itťruption temps rťel |
| $FFF2,$FFF3 | $00EE,$00EF,$00F0 | IRQ barre |
| $FFF4,$FFF5 | $00F1,$00F2,$00F3 | XIRQ barre |
| $FFF6,$FFF7 | $00F4,$00F5,$00F6 | SWI |
| $FFF8,$FFF9 | $00F7,$00F8,$00F9 | Code Op illťgal |
| $FFFA,$FFFB | $00FA,$00FB,$00FC | COP chien de garde |
| $FFFC,$FFFD | $00FD,$00FE,$00FF | Surveillance de l'horloge |
| $FFFE,$FFFF | $BF40,$BF41,$BF42 | Reset barre |

